Driving / Technique
Generally speaking, given that the engine is the heaviest single component of a vehicle, the location of the engine greatly influences the location of a vehicle's center of mass ("COM"), and so greatly affects the natural handling tendencies of a vehicle. Understanding a vehicle’s natural handling tendencies will help the driver anticipate how it will behave throughout a corner, allowing one to push the car the way it wants to be pushed, so one can get faster, faster.
It also reduces driver frustration when one knows what the vehicle is going to do before it does it. This lack of conscious confusion allows the driver to sink into a state of flow where they can drive via intuition.
Center of Mass Effects
The location of the center of mass affects the handling of the vehicle in a couple of ways.
Balance / Performance
First, the location of the COM affects the mid-corner balance/performance of the vehicle. This effect is from a combination of the weight distribution over the front and rear axles (and therefore tires), lever arm differences between the front and rear axles, and the effects of tire load sensitivity.
If the engine, and therefore COM, is centered front to rear between the two axles, then the front tires and rear tires will have the same weight, therefore generating the same grip. Further, the front tires will have the same lever arm between their axle and the COM as the rear tires.
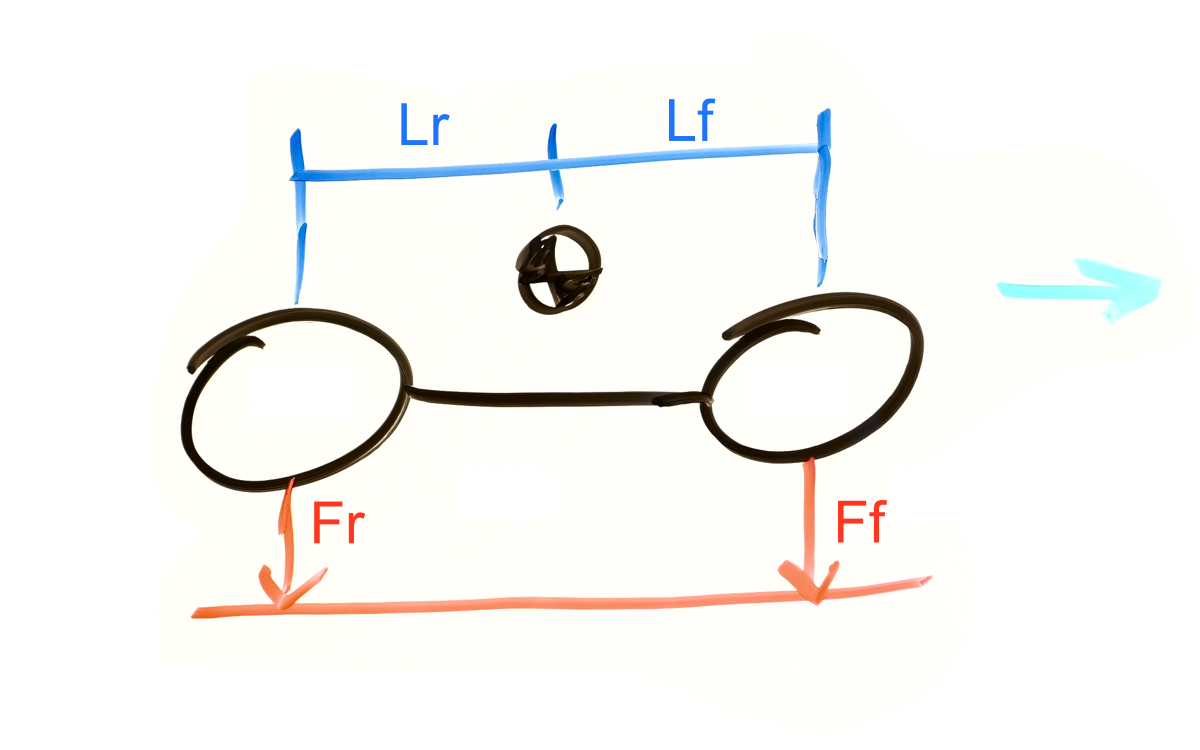
Lr × Fr = Lf × Ff
In this situation the vehicle will be balanced; each axle will be able to generate the same cornering force, and their lever arms to the COM are the same (meaning they will each have the same mechanical advantage over the COM), preventing one axle from being able to rotate the vehicle more than the other. As such, one can push the front and rear axles to their limit throughout a corner and be using all the grip available, maximizing cornering performance.
However, if the engine/COM are toward the front axle, the front axle will generate more grip than the rears, but will also have a shorter lever arm to the COM.
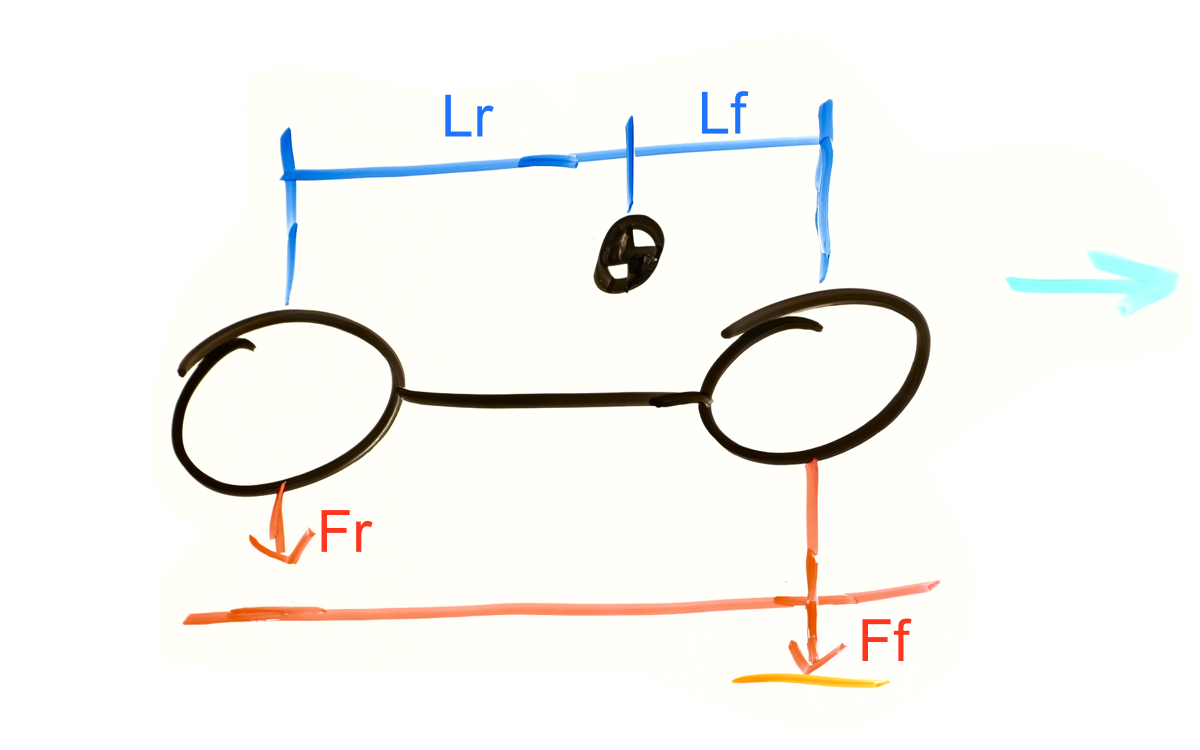
Lr × Fr = Lf × Ff
So how do these opposing effects balance? Well, if it was only these two affects at play (greater front tire grip and lesser front axle lever arm) there would be a proportional balance between the front and rear axles, resulting in a vehicle that is still balanced through a turn. However, due to the third effect of tire load sensitivity, even though the front tires will have more grip than before, they won’t have quite as much grip as one might expect, and in fact, the proportion of grip they gain is less than the proportion of lever arm they lose, so the net effect is less rotational control relative to the rears.
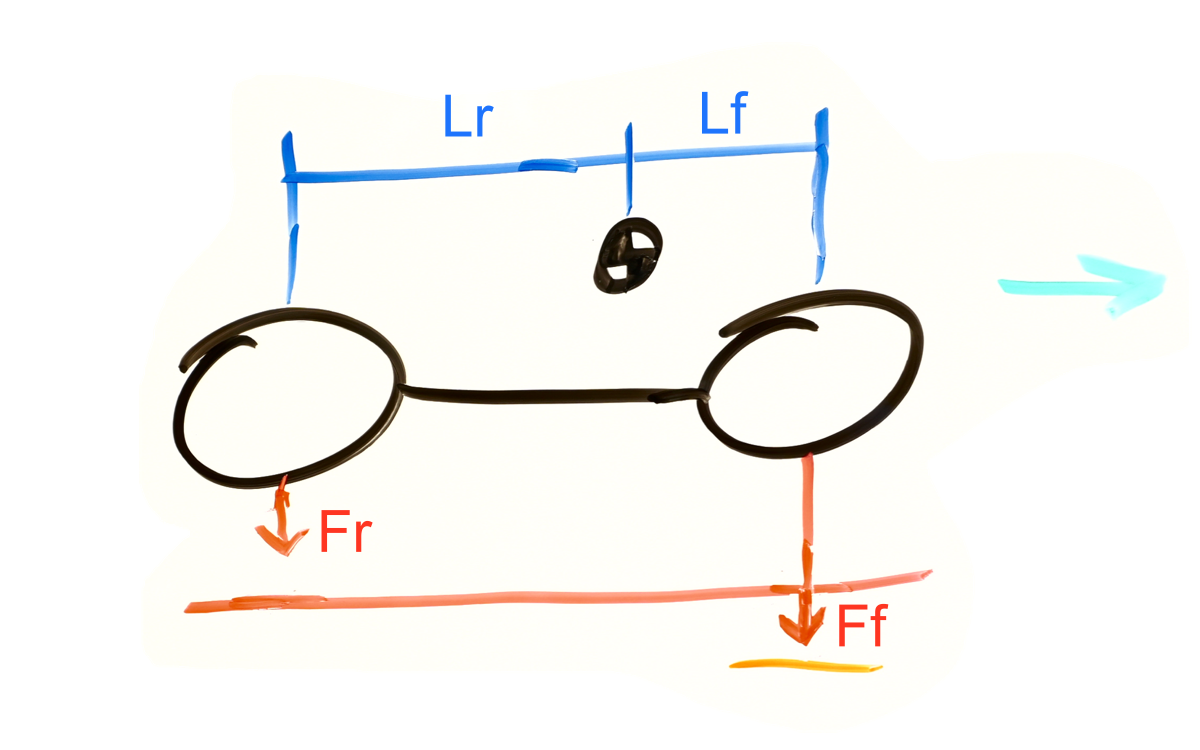
Lr × Fr > Lf × Ff
Yes, even though the front tires have more grip than the rears, they have less ability to control the vehicle compared to the rears due to their lessened mechanical advantage paired with the fact that their additional grip has suffered from the diminishing effects of load sensitivity.
Therefore, a front engine vehicle will tend to understeer. Of course, setup changes and design choices can affect the roll couple distribution in any way one wants, allowing one to move this understeer tendency toward neutral or oversteer, but this can only be done by diminishing the grip of one axle over the other; one can’t add grip. And so, no matter what compromises a setup engineer or vehicle designer may or may not make, the vehicle will not have as much cornering performance compared to a vehicle with a centered COM.
And then, of course, we can understand that a rear engine/COM vehicle will tend towards oversteer for the same reasons as above, but mirrored.
Weathervane Effect
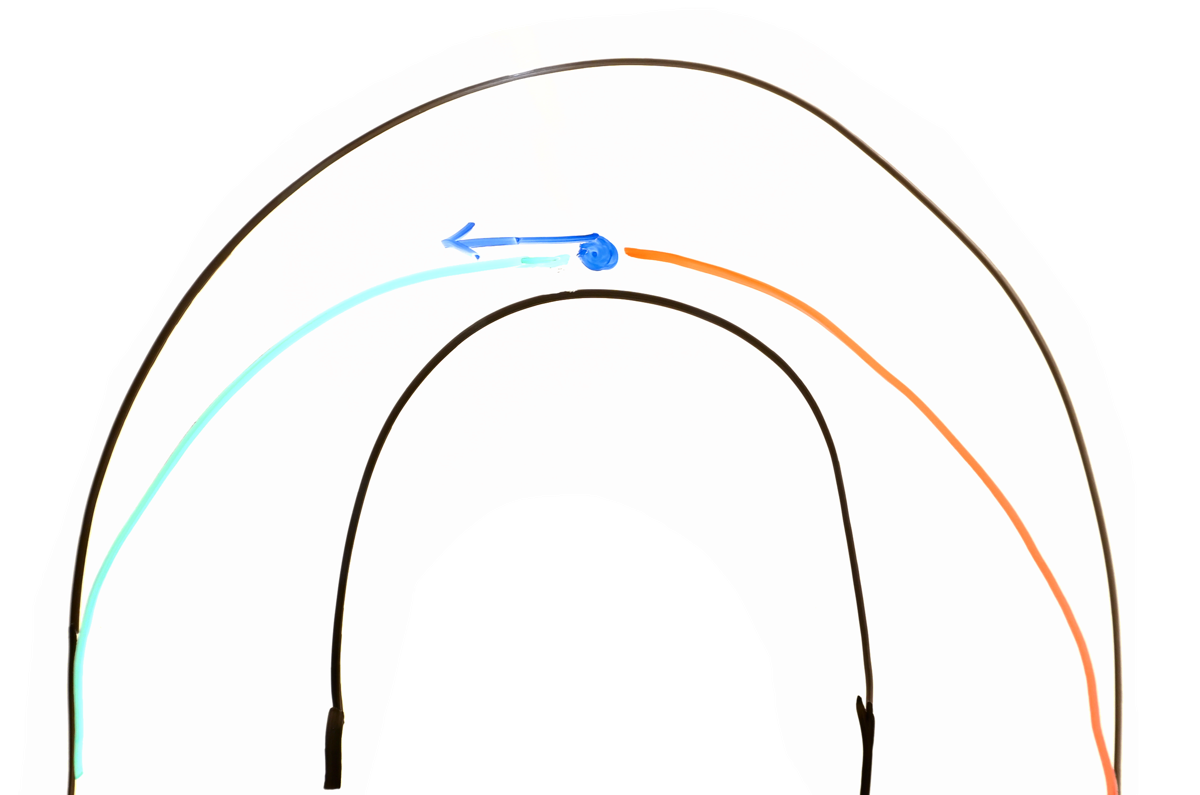
The COM location of a vehicle also has a second effect; differing inertia of the front end vs rear end as one navigates around a corner.
Imagine, as one drives through a corner, pulling sideways on the COM with an imaginary string. If the COM is in the center of the car, the front and back axles will resist the outward pull equally and the vehicle will be stable. However, if the COM is ahead or behind the center of the vehicle, one end will have more work to do than the other, causing the overloaded end to want to slide out.
One implication of this effect is that a front engine vehicle will be better at attacking kerbs as it will tend towards pointing forward (like a weathervane in the wind), making awkward landings less risky.
Other implications of this effect will be explored throughout the rest of this post.
Cornering Phases
Corner Entry
When entering a corner, a mid-engine vehicle will be quite balanced, it’s COM pulling equally on both the front and rear axles. Forward load transfer due to trail braking will of course move some of it’s weight forward, but this effect is under the control of the driver and can be modulated for more or less front grip. The overall effect is a balanced car that rotates well and responds intuitively to trail braking modulation.
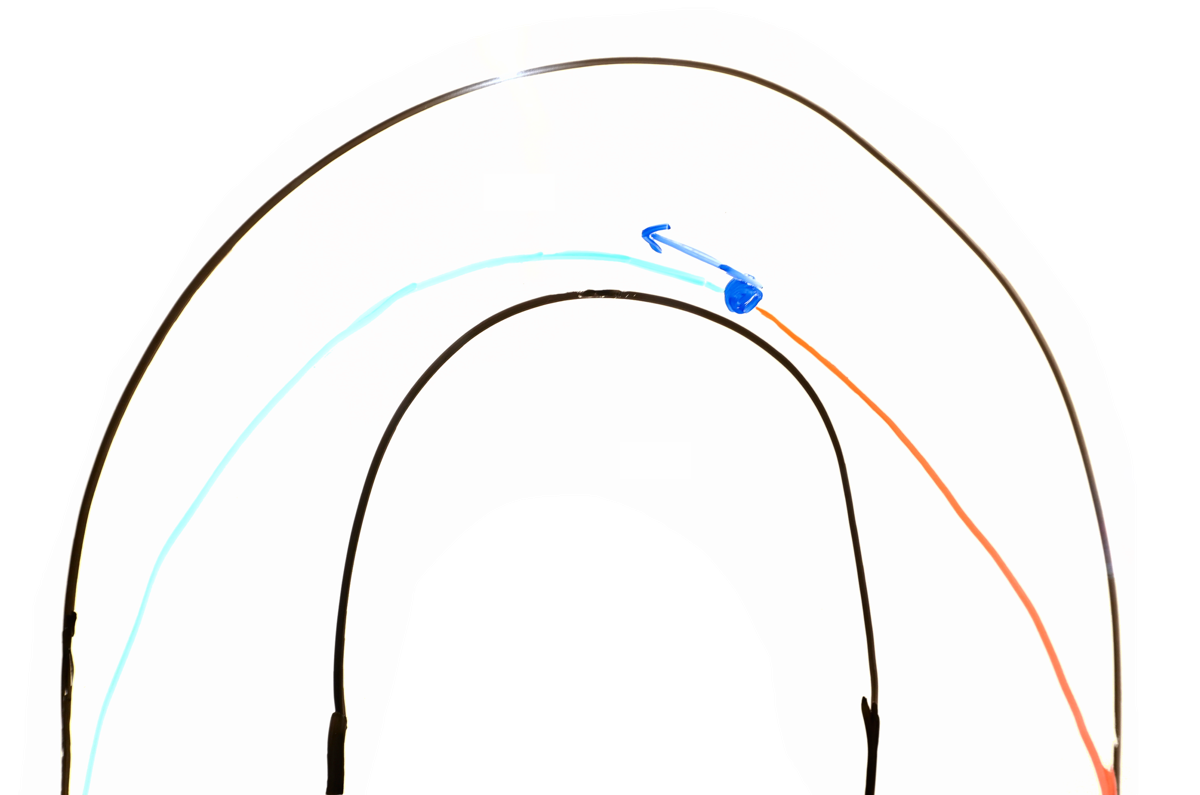
In the case of a front-engine vehicle, the weathervane effect is quite noticeable, with the COM having a stronger sideways pull on the front of the vehicle than the rear. This results in a front axle that is wanting to wash out more readily and therefore is not as quick to rotate and therefore turn. Trail braking will of course give more grip to the front wheels, but the general tendency of the vehicle is not to rotate when entering a corner.
During corner entry with a rear-engine vehicle, the weathervane effect is just as noticeable as a front-engine vehicle, but with the opposite effect. The rear of the vehicle will want to swing out like a pendulum and so the front wheels need to be controlled by the driver through steering to keep the vehicle pointing in the right direction, lest it spin out of control. Trail braking will only make this effect more pronounced, so while trail braking is certainly necessary on corner entry, much less must be used when driving a rear-engine vehicle and therefore more braking must be done before entering the corner.
Mid-Corner
In the mid corner, a vehicle is not in a dynamic state; it is fully leaned over, cutting an arc of constant speed through the corner's apex.
A mid-engine engine vehicle will have maximum cornering performance as the axles will be equally weighted front and rear, spreading the load out evenly and generating the maximum possible grip.
However, if the COM is not centered such as with front or rear-engine vehicles, the axles will not be equally weighted and therefore one end or the other will be limiting cornering performance. A vehicle’s setup or suspension design can diminish the cornering performance of the more effective axle, effectively balancing the car, but a vehicle with a more centered COM would not need such a compromise and would therefore generate more grip mid-corner.
Corner Exit
The exit phase of a corner is unique in that the driven axle adds another dimension to the handling of a vehicle.
A mid-engine, rear wheel drive ("RWD") vehicle, as always, will be fairly balanced. It will understeer slightly due to weight transfer to the rear axle as vehicle accelerates, but a driver will be taking out steering angle throughout the corner exit phase anyway, so this works together well. That said, a powerful vehicle will still be able to overwhelm the rear tires and so thoughtful throttle application is needed.
A front-engine RWD vehicle has a natural lack of weight over the rear wheels which will make the rear end floaty under power. Paired with a loose differential, the vehicle will tend to rotate quite well on corner exit, essentially making up for the lack of rotation earlier in the corner. However, while throttle application will encourage rotation, and rearward weight transfer due to acceleration will add additional load to the rear tires, this format is the most likely to break loose on corner exit and thus slow and gentle throttle application is mandatory.
Corner exit is where a rear-engine RWD vehicle shines. The natural weight over the rear tires plus additional load due to load transfer will add up to the most rear axle load of all race car formats. This allows the driver to really put down the power hard on corner exit, rocketing out of the corner and down the following straight. The compromise is that the very lightly loaded front tires will cause the most significant corner exit understeer of any format, so the vehicle's strong ability to rotate on corner entry must be used to set the car up for a fairly straight exit trajectory.
Front wheel drive ("FWD") vehicles are always front engine. The FWD vehicle has a terrible time powering out of corners. Under acceleration, the weight transfers off the front, driven axle to the rear axle, diminishing the ability of the vehicle to put down power. This rearward load transfer also causes understeer by reducing the grip of the front axle, which is then exacerbated by the front tires being tasked with providing forward acceleration as well as facilitating turning through steering.
Bringing it All Together
Mid-Engine RWD
The mid-engine vehicle is quite straightforward. It rotates fairly well on corner entry, mid-corner, and corner exit, without any strong tendencies toward oversteer or understeer. A driver is simply focused on taking the apex where expected and keeping the car on the limit throughout the turn.
Front-Engine RWD
The front-engine RWD vehicle is a bit odd, but fairly easy to deal with once one knows what to expect from it. It will not rotate quite as readily on corner entry, but this can be made up for by its strong tendency to rotate in the second half of the corner. Therefore, when entering a corner, a driver should aim for a slightly earlier apex, expecting to do more rotation after the apex than before. Patience and precision with the throttle is necessary to make sure once gets the rotation needed, and whatever exit speed one can find, without resulting in power oversteer.
Front engine vehicles tend to have more room for larger engines, so its primary advantage will come from straightaways where it can reach higher top speeds than its competitors.
Rear-Engine RWD
Instead of being “odd” like the front-engine RWD vehicle, the rear-engine vehicle could perhaps be best described as “wild”. An over-rotating animal on corner entry and a rocket ship on corner exit, the rear engine vehicle must do as much rotation as possible in the first half of the corner. It is therefore necessary to take a slightly later apex, using the corner up to that point to get the vehicle pointing toward the exit curb as much as possible.
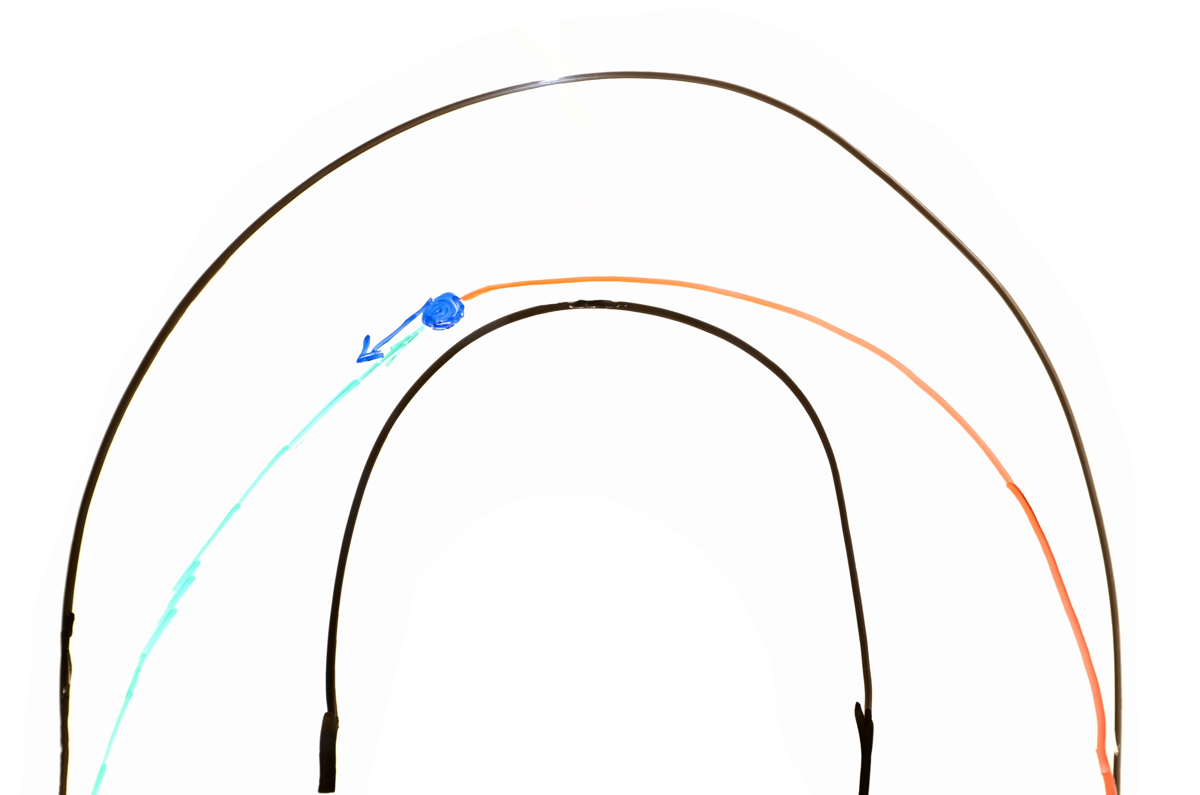
Special care must be taken on corner entry to not over-rotate the vehicle (aka: spin out of control). This conflicts with our need to trail brake in order to rotate the vehicle tightly before reaching the apex, and so, one must expect a long trail brake but at lower brake levels, the implication being that more braking must be done before entering the corner as one will not be bleeding off as much speed throughout the corner entry phase.
Front-Engine FWD
The FWD vehicle will understeer massively on corner exit, so one must get it rotated as much as possible before the apex. However, the forward COM fights rotation during the corner entry phase due to the weathervane effect, and so there is no natural give and take one can take advantage of in their driving style. One must simply brake as much as possible before entering the corner and use what cornering performance is available to try to rotate the vehicle as much as possible before gently applying power on corner exit.
FWD race cars are an exercise in patience. Lacking patience on corner entry and trying to trail brake one's problems away will cause the front tires to overheat or lock up, increasing understeer. Lacking patience on corner exit and trying to use the throttle to escape the corner as quickly as possible will cause the front tires to overheat and brake loose, increasing understeer.
While overdriving other vehicle formats will generally cause oversteer that can be turned into understeer through driver inputs, FWD vehicles will really only understeer, so abusive driving styles or small mistakes don’t have an opposing effect available for the driver to use to balance out poor technique.
Conclusion
Each of the four vehicle formats discussed requires its own cornering style in order to maximize performance. A driver that does not anticipate these differences will find themselves slow, frustrated, and constantly correcting mistakes they did not anticipate.
By working with the natural tendencies of a vehicle, a driver can know how to push a vehicle throughout all phases of a corner, anticipating the limiting factors and getting the most out of the vehicle's advantages.